
The number of diesel-electric submarines that could challenge US naval forces is growing throughout the world. The need to offset the risk posed by such small and quiet subs, particularly at the littorals and narrow strait is becoming critical.
“Our goal is to transition an operational game-changer to the Navy’” said Defense Advanced Research Projects Agency (DARPA’s) Anti-Submarine Warfare Continuous Trail Unmanned Vehicle (ACTUV) Program Manager Scott Littlefield, “This should create an asymmetry to our advantage, negating a challenging submarine threat at one-tenth their cost of building subs.”
US defense contractor Science Applications International Corporation (SAIC) is developing a new concept for unmanned surface vessel that will be able to locate and track submarines deep under the water, at levels of precision, persistence and flexibility far beyond those available by manned surface ships operating anti-submarine warfare. Such capabilities could become particularly important as the US Naval missions are focused toward littorals in the Hormuz Straits, the Persian Gulf, South China Sea, East Africa, the Mediterranean and the Caribbean Sea.
In August 2012 DARPA awarded SAIC $58 million for the development of a prototype Anti-Submarine Warfare Continuous Trail Unmanned Vehicle (ACTUV) to be ready for at-sea operational testing by mid 2015. SAIC was one of several companies developing conceptual designs for the new vessel. The agency selected the wave piercing Trimaran design for the prototype. According to SAIC, this design will be able to perform continuous missions lasting up to three months at sea, operating autonomously, or semi-autonomously.
The vessel is designed to operate fully autonomously, providing a forward deployed and rapid-responsive ‘node’ in the global maritime surveillance network. This network will be shared by manned and unmanned assets such as naval forces, P-8A Poseidon aircraft and RQ-4C Triton (BAMS) drones. The ACTUV will be capable of ‘sprinting’ rapidly to arrive as soon as possible in the area of operation, quickly establish track of quiet diesel-electric submarines and shadow such targets overtly for months, over thousands of kilometers, with minimal human input.
The Predator Becoming the Prey
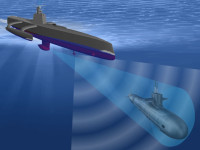
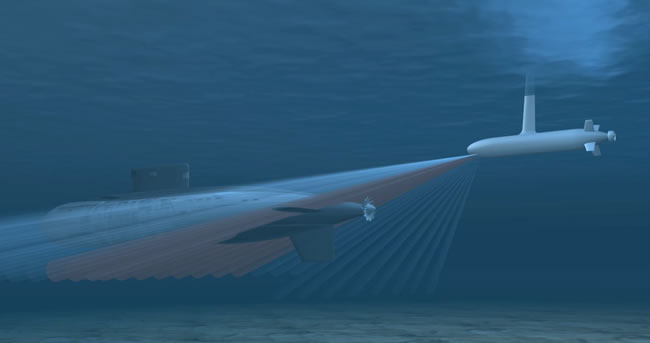
To establish the initial detection ACTUVs could rely on its own sensors or more likely on sonobuoys dropped by maritime surveillance aircraft, drones or ships. Effectively covering a wide area, these sonobuoys will provide the initial indication on the presence of a suspected target. Forward deployed near designated areas of operation. With ACTUV arriving at area, the unmanned vessels will deploy the long-range acquisition mid-frequency active-passive sonar carried in the two side pods, to verify the presence of submarines, and assess the ‘area of uncertainty’ (AOU) affected by the threat, limiting surface ships movement in that area. Follow-through with two higher frequency sonars located in the main hull, are used to improve tracking precision and mission reliability. Once in close proximity to the target, total field magnetometer arrays are used to provide additional information about target activity. Once continuous track is established, very high frequency sonar is used to paint an ‘acoustic image’ of the target, thus identify and classify it as a specific submarine. Once the AOU has been determined and the threat positively identified, thus verifying the AOU boundaries, the rest of the area would be safe passage, the ACTUV will shadow the suspected submarine, keeping it at risk, vulnerable to attack if it moves offensively against friendly forces.
ACTUV is designed to outperform and out-endure conventionally powered diesel-electric submarines, (including those using Air Independent Propulsion – AIP), even when they are remaining quiet or try to evade the shadowing vessel, thus keeping them at risk until they return to their home bases.
In fact, ACTUV performs the role of a number of manned ASW surface vessels currently used to defend carrier battle groups or other flotillas from submarine threats. Their autonomous operation will enables the Navy to commit manned platforms to offensive operations and other support roles, requiring human support, leaving the ASW mission for the unmanned platform.
The award will see SAIC provide a final design and production plan for the ACTUV prototype in phase two, construction of the prototype is scheduled to be completed in phase three, and government testing in phase four demonstrate an experimental vessel capable of independently deploying under sparse remote supervisory control, to achieve ‘a game-changing ASW operational capability, with the ultimate objective to facilitate rapid transition of that capability to the navy in response to critical operational demand’.
Ultimate Autonomy

“This surface platform is conceived from concept to field demonstration under the premise that a human is never intended to step aboard at any point in its operating cycle. “ Program Manager Scott Littlefield said. “As a result, a new design paradigm emerges with reduced constraints on conventional naval architecture elements such as layout, accessibility, crew support systems, reserve buoyancy and dynamic stability.” The objective is to generate a vessel design that exceeds state-of-the art platform performance to provide complete propulsive overmatch against diesel electric submarines at a fraction of their size and cost.” The advanced level of autonomy will enable independently deploying systems to operate on missions spanning thousands of miles in range and months of endurance, under a sparse remote supervisory control model. “Such missions require autonomous compliance with maritime laws and conventions for safe navigation, autonomous system management for operational reliability, and autonomous interactions with an intelligent adversary.” Littlefield added. In fact, the only time a sailor will be required to be present on board will be to start the vessel and help guiding it out of port. On-board computers will control the rest of the mission. To assess the strategy and tactics necessary for controlling the vessel at sea, while avoiding other vehicles and obstacles, DARPA developed a strategy game called ‘Dangerous Waters’. The agency has integrated the ACTUVs tactics simulator into the game, as part of the toolkit available for gamers. The agency planned to select the best tactics developed by the gamers and build them into the ACTUV prototype.
DARPA scientists believe the core platform and autonomy technologies developed under the ACTUV program will be extendable to underpin a wide range of missions and configurations for future unmanned naval vessels.
Pete Mikhalevsky, SAIC senior vice president and operations manager, said: ‘Drawing on SAIC’s technical depth in marine hydrodynamics, ship design, sensors, and advanced autonomy, we’re confident that the SAIC team will meet or exceed DARPA’s requirements for ACTUV, a revolutionary autonomous maritime vessel.















