

Several contracts awarded recently marked significant progress in DARPA’s Ground X-Vehicle Technologies (GXV-T) program with field demonstrations of projects developed by teams and companies under the Phase 2 of the R&D program. Among the technologies showing much progress are extreme mobility projects and crew augmentation technologies.
The GXV-T program aims to demonstrate how future combat vehicles could improve mobility, survivability, safety, and effectiveness without increasing their armor.
“We’re looking at how to enhance survivability by buttoning up the cockpit and augmenting the crew through driver-assistance aids,” said Maj. Amber Walker, the program manager for GXV-T in DARPA’s Tactical Technology Office (TTO). “For mobility, we’ve taken a radically different approach by avoiding armor and developing options to move quickly and be agile over all terrain.”
Demonstrations, such as those performed in May at the Aberdeen Test Center, have given potential military service transition partners an opportunity to observe technical progress on the GXV-T program. Among the technologies recently demonstrated by GXV-T participants are:
Radically Enhanced Mobility
GXV-T envisions future combat vehicles that could traverse up to 95 percent of off-road terrain, including slopes and various elevations. Capabilities include revolutionary wheel-to-track and suspension technologies that would enable access and faster travel both on- and off-road, compared to existing ground vehicles.
Reconfigurable Wheel-Track (RWT)

Wheels permit fast travel on hard surfaces while tracks perform better on soft surfaces. A team from Carnegie Mellon University National Robotics Engineering Center (CMU NREC) demonstrated shape-shifting wheel-track mechanisms that transition from a round wheel to a triangular track and back again while the vehicle is on the move, for instant improvements to tactical mobility and maneuverability on diverse terrains.
Electric In-hub Motor
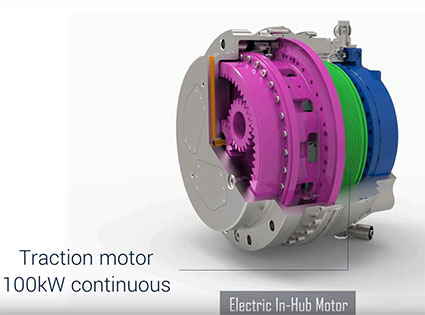
Putting motors directly inside the wheels offers numerous potential benefits for combat vehicles, such as heightened acceleration and maneuverability with optimal torque, traction, power, and speed over rough or smooth terrain. In an earlier demonstration, QinetiQ demonstrated a unique approach, incorporating three gear stages and a complex thermal management design into a system small enough to fit a standard military 20-inch rim.
Multi-mode Extreme Travel Suspension (METS)
Pratt & Miller’s METS system aims to enable high-speed travel over rough terrain while keeping the vehicle upright and minimizing occupant discomfort.
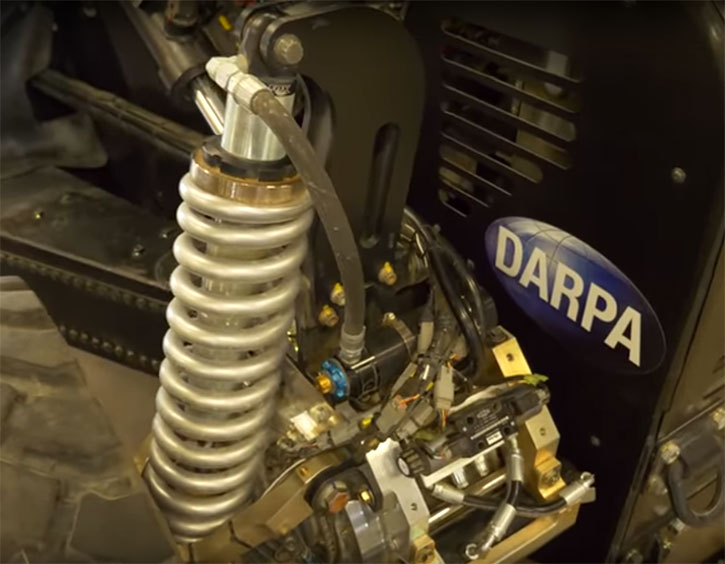
The vehicle demonstrator incorporates standard military 20-inch wheels, advanced short-travel suspension of four-to-six inches, and a novel high-travel suspension that extends up to six feet – 42 inches upward and 30 inches downward. The demonstration in May showed off its ability to tackle steep slopes and grades by actively and independently adjusting the hydraulic suspension on each wheel of the vehicle.
Crew Augmentation
Traditional combat vehicle designs have small windows that improve protection but limit visibility. GXV-T sought solutions with multiple onboard sensors and technologies to provide high-resolution, 360-degree situational awareness while keeping the vehicle enclosed.
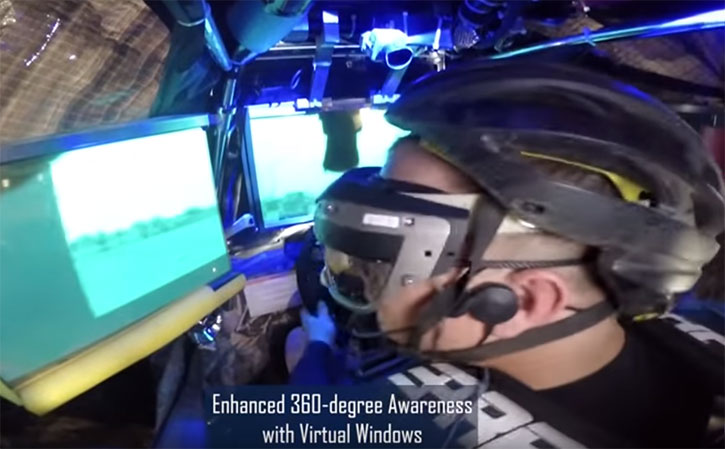
Enhanced 360-degree Awareness with Virtual Windows
Honeywell International demonstrated its windowless cockpit in an all-terrain vehicle (ATV) with an opaque canopy. The 3-D near-to-eye goggles, optical head-tracker, and wrap-around Active Window Display screens provide real-time, high-resolution views outside the vehicle. In off-road courses, drivers have completed numerous tests using the system in roughly the same time as drivers in All Terrain Vehicles (ATVs) with full visibility.
Virtual Perspectives Augmenting Natural Experience (V-PANE)

A tactical vehicle offers limited visibility and data for decision-making, especially when moving rapidly through unfamiliar territory. Raytheon BBN Technologies’ V-PANE technology demonstrator fuses data from multiple vehicle-mounted video and LIDAR cameras to create a real-time 3-D model of the vehicle and its nearby surroundings. In a final Phase 2 demonstration, drivers and commanders in a windowless recreational vehicle successfully switched among multiple virtual perspectives to accurately maneuver the vehicle and detect targets of interest during both low- and high-speed travel.
Off-Road Crew Augmentation (ORCA)
A second CMU NREC technology demonstration, ORCA aims to predict in real time the safest and fastest route and when necessary, enable a vehicle to drive itself off-road – even around obstacles. In Phase 2 testing, drivers using the ORCA aids and visual overlays traveled faster between waypoints and eliminated nearly all pauses to determine their routes. The team found autonomy improved either vehicle speed or risk posture, and sometimes both.
Walker said GXV-T performers are pursuing a variety of transition paths for the new technologies. “DARPA is excited about the progress made to date on the GXV-T program and we look forward to working with the Services to transition these technologies into ground vehicle technologies of the future,” said Walker.




")













