The US Defense Department’s Advanced Research Programs Agency (DARPA) selected Lockheed Martin and Raytheon as the prime contractors for the agency’s Collaborative Operations in Denied Environment (CODE) demonstration. The program seeks to help conduct dynamic Unmanned Aircraft Systems (UASs) operations over long distances, against short lived, moving targets in denied or contested electromagnetic airspace. While improving the flexibility of force projection CODE will decrease the communication bandwidth required to control such airborne forces and reduce cognitive burden on human supervisors.
DARPA recently awarded Phase 2 system integration contracts for CODE to Lockheed Martin Corporation (Orlando, Fla.) and the Raytheon Company (Tucson, Ariz.). The two prime contractors for the program that will collaborate with six teams that continue their work from Phase 1, supporting technologies associated with CODE.

the following six companies—all of which had Phase 1 contracts with DARPA to develop supporting technologies for CODE—will collaborate in various ways with the two prime contractors:
- Daniel H. Wagner Associates (Hampton, Va.)
- Scientific Systems Company, Inc. (Woburn, Mass.)
- Smart Information Flow Technologies, LLC (Minneapolis, Minn.)
- Soar Technology, Inc. (Ann Arbor, Mich.)
- SRI International (Menlo Park, Calif.)
- Vencore Labs dba Applied Communication Sciences (Basking Ridge, N.J.)

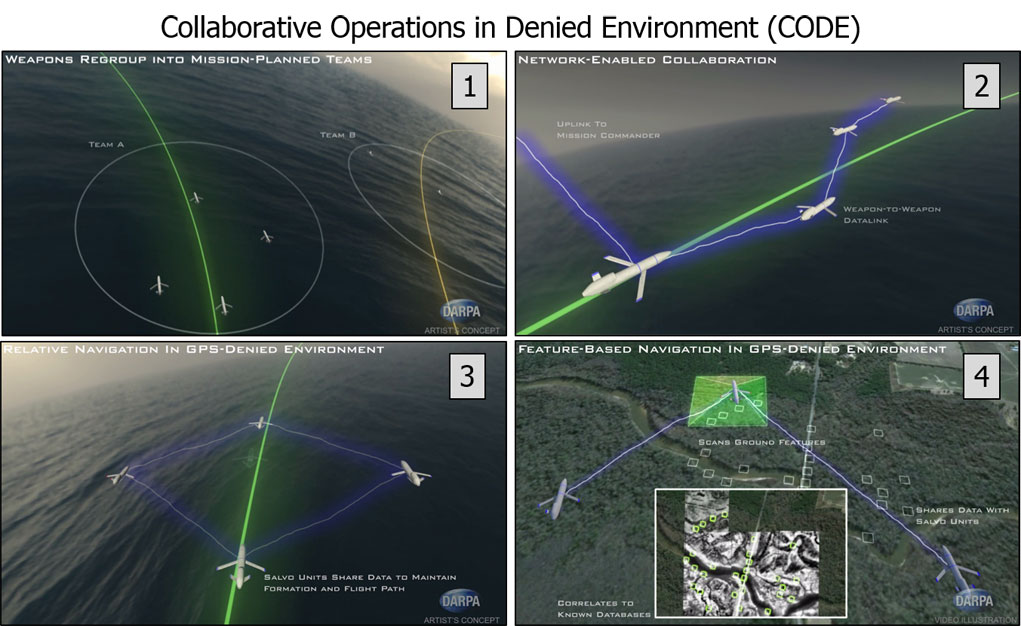
CODE’s main objective is to develop and demonstrate the value of collaborative autonomy, in which UASs could perform sophisticated tasks both individually and in teams under the supervision of a single human mission commander. CODE-equipped UASs would perform their mission by sharing data, negotiating assignments, and synchronizing actions and communications among team members and with the commander.
CODE’s modular, open software architecture embedded on board the UASs would enable multiple CODE-equipped unmanned aircraft to navigate to their destinations and find, track, identify, and engage targets under established rules of engagement.
The UASs could also recruit other CODE-equipped UASs from nearby friendly forces to augment their capabilities and adapt to dynamic situations such as attrition of friendly forces or the emergence of unanticipated threats.
A video showing promising early research into the interface is available below:
“During Phase 1, we successfully demonstrated, in simulation, the potential value of collaborative autonomy among UASs at the tactical edge, and worked with our performers to draft transition plans for possible future operational systems,” said Jean-Charles Ledé, DARPA program manager. “Between the two teams, we have selected about 20 autonomous behaviors that would greaty increase the mission capabilities of our legacy UASs and enable them to perform complex missions in denied or contested environments in which communications, navigation, and other critical elements of the targeting chain are compromised. We have also made excellent progress in the human-system interface and open-architecture framework.”
CODE’s prototype human-system interface (HSI) is designed to allow a single person, either a pilot or ground controller to visualize, supervise, and command a team of unmanned systems in an intuitive manner. Mission commanders can know their team’s status and tactical situation, see pre-planned and alternative courses of action, and alter the UASs’ activities in real time.
For example, the mission commander could pick certain individual UASs from a team, circle them on the command station display, say “This is Group 1,” circle another part of the map, and say “Group 1 search this area.” The software then creates a sub-team with the circled UASs, divides up the search task among those assets, and redistributes the original tasks assigned to Group 1 assets to the remaining UASs. This capability significantly simplifies the command and control of large groups of UASs. Other parts of the HSI research focused on how to display the new plan, including the potential impact on other mission objectives, and—depending on pre-set mission rules—either directly executes the plan or waits for the commander’s approval to act.
The HSI and autonomy algorithms are being developed in open architectures based on emerging standards. These include the Future Airborne Capability Environment (FACE) and Unmanned Control Segment (UCS) standards used by the U.S. Army and U.S. Navy, and the Open Mission Systems (OMS) and Common Mission Command and Control (CMCC) standards that the U.S. Air Force uses.
During Phase 2, DARPA plans to implement an initial subset of the behaviors within each of the two open architectures and use those architectures to conduct live flight tests with one or two live UASs augmented with several virtual aircraft. If those tests are successful, DARPA could move to Phase 3, in which one team would test the capabilities using up to six live vehicles cooperating among themselves and with additional simulated vehicles. A single person would command the UAS team to perform a complex mission involving target search, identification, and engagement against an active, unpredictable adversary.